
Chế tạo người máy mềm bằng công nghệ in 3D được lấy cảm hứng từ Origami
Ngày tạo: 17/09/2020 10:11:42 SACác nhà nghiên cứu từ Trung Quốc đã được truyền cảm hứng từ các cấu trúc và vật liệu origami, dẫn họ đến sự phát triển phức tạp hơn của robot, như được trình bày trong cuốn sách: “Origami Spring Inspired Metamaterials and Robots: An Attempt for a Perfect Programmable Robot” được xuất bản gần đây.
Từ dụng cụ phẫu thuật sáng tạo đến kỹ thuật, ăng-ten và thậm chí các ứng dụng có thể mở rộng cho robot gấp, đây không phải là lần đầu tiên chúng ta thấy các tác phẩm lấy cảm hứng từ origami. Trước đây chỉ là nghệ thuật gấp giấy mỏng manh, trong nghiên cứu này, các nhà nghiên cứu đã tìm cách lập trình vật liệu thành một hệ thống robot. Điều này có nghĩa là kiểm tra không chỉ khả năng in 3D mà còn cả khả năng gập lại và các đặc tính cơ học cần thiết.
Các nhà nghiên cứu giải thích: “Ngoài các phương pháp tiếp cận cơ học, nghệ thuật gấp giấy origami hiện đang được chấp nhận như một nguồn cảm hứng trực quan và màu mỡ cho thiết kế siêu vật liệu cơ học do khả năng gấp lại, khả năng triển khai, tính linh hoạt, hình học không quy mô cũng như cấu hình lại có thể lập trình được. rằng nghiên cứu trước đó đã mang lại các rô bốt thu nhỏ, rô bốt mềm, rô bốt có thể ăn được cho các nhiệm vụ y tế, mô-đun tuân thủ, thiết bị y tế, máy gắp, v.v.”
Nhóm nghiên cứu đã bắt đầu với một chiếc lò xo gấp giấy origami và sau đó phát triển thành các vai trò siêu vật liệu nhằm khám phá các đặc tính thu được từ hình học gấp. Cuối cùng, vì vật liệu in 3D được gấp lại khi cần thiết, nguyên mẫu của họ đã có thể thu thập thông tin.
 |
Lò xo đóng mở được lấy cảm hứng từ một hình chữ nhật bằng giấy được gấp và xoắn với các hình tam giác vuông đồng nhất.
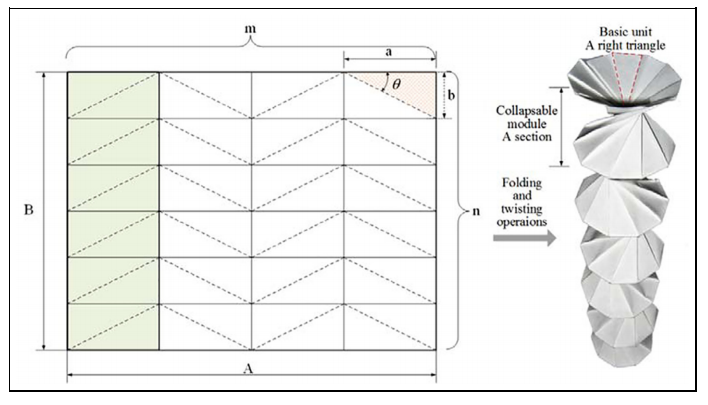 |
Các nhà nghiên cứu giải thích: "Nhìn từ trên xuống, khi lò xo giấy được mở ra, chiều rộng của lò xo co lại theo hình xoắn ốc, và diện tích chồng chéo giữa các quạt tăng lên cho đến khi chúng hoàn toàn chồng lên nhau."
 |
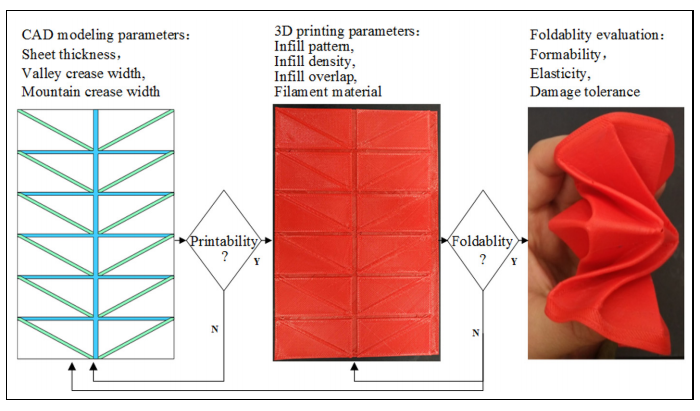 |
Sử dụng máy in 3D tùy chỉnh của riêng họ, PLA và một vòi phun FDM 0,3mm, họ đã có thể “gia công kỹ thuật số các siêu vật liệu mùa xuân lấy cảm hứng từ origami”. Họ đã có thể tạo ra một cái kẹp mềm được chứng minh là "có thể in 3D hoàn toàn" và hữu ích để nhặt các vật thể có hình dạng bất thường hơn.
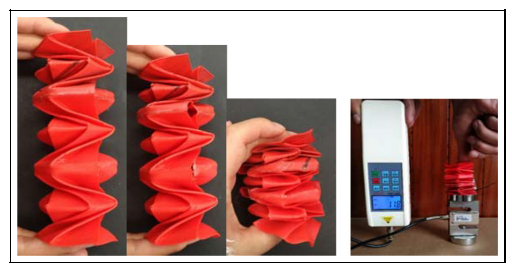 |
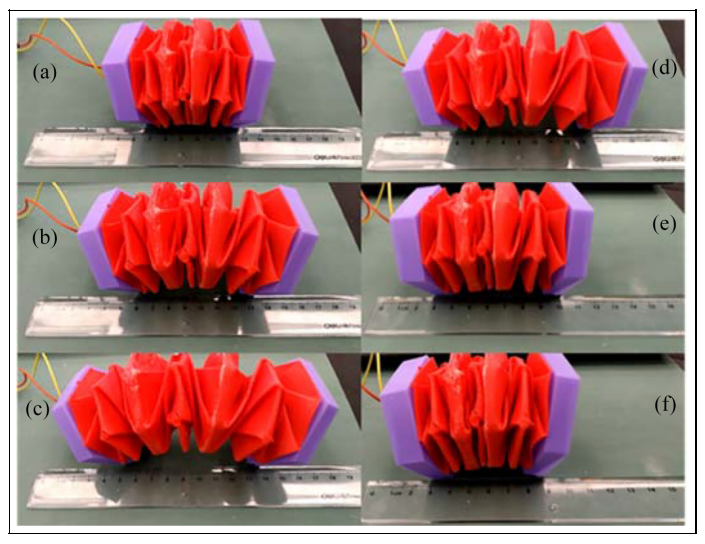
Nhìn chung, nhóm đã có thể sử dụng in 3D như một phương pháp điều khiển có thể lập trình, với các đặc tính cơ học cần thiết — vượt qua mọi trở ngại liên quan đến khả năng in, khả năng gập lại và nhu cầu về khả năng chịu thiệt hại tốt hơn. Hai loại rô bốt mềm đã được chế tạo thành công, bao gồm cả “creeping robot”.
 |
 |
Khi việc sử dụng in 3D, in 4D và siêu vật liệu tiếp tục mở rộng thông qua nghiên cứu toàn cầu, công nghệ robot mềm ngày càng trở nên khả thi hơn thông qua các công nghệ tiên tiến hơn như sản xuất kỹ thuật số, bao gồm cả robot mềm sinh học, Nhiều cải tiến khác nhau bao gồm thiết bị truyền động và rô bốt tích hợp.
Nguồn: 3dprint
Data Design Việt Nam
Tags: data design data design viet nam ddv công nghệ in 3d in 3D CAM Software rhinocam rhino cad cam rhinocam price rhinocam for rhino 6 mecsoft rhinocam


.jpg)

.jpg)